로봇틱 아앎
올해 ROS를 활용한 6축 매니퓰레이터를 만드려고 공부를 하고 있습니다.
어느날 알게 된 멋진 블로그를 보고 LKM-Tech의 MG시리즈 모터를 6개 구입했습니다.
저는 전기와 하드웨어를 만져본 일이 거의 없어 간단한 것이라도 시작하기가 어려운 굉장한 심리적 장벽이 있는 것 같습니다.ㅋ.. 그래도 오늘은 조금씩 준비했던 것들을 바탕으로 처음으로 모터를 돌려보기로 했습니다.
모터의 정상작동을 알아보기 위해 CP210x브릿지 드라이버를 설치합니다.
운영체제에 맞도록 골라 설치합니다. 윈도우에서 확인하겠습니다. 결국에는 ROS와 Moveit에 알맞은 리눅스 환경에서 돌려볼 생각입니다.
http://en.lkmotor.cn/Download.aspx?ClassID=44
Drive-Shanghai LingKong Technology Co., Ltd
en.lkmotor.cn



* Silicon Laboratories의 CP210x는 USB to UART 브리지 칩셋입니다. CP210x 칩셋은 USB를 통해 간편하게 시리얼 통신을 구현할 수 있어 임베디드 시스템 개발, 산업용 통신 장비, 센서 데이터 수집, IoT 디바이스 연결 등에서 널리 사용됩니다.
주요 기능
USB 포트를 통해 UART(Universal Asynchronous Receiver/Transmitter) 직렬 통신을 가능하게 함
가상 COM 포트(VCP)로 동작하여 기존 시리얼 포트 기반 장치와의 호환성 제공
다양한 운영 체제에서 사용 가능(Windows, macOS, Linux 등)
드라이버 설치 후 장치 관리자에서 "Silicon Labs CP210x USB to UART Bridge"로 인식됩니다.
다음으로 LK motor tool 이라는 모터의 작동+모니터링 프로그램을 설치합니다.
http://en.lkmotor.cn/Download.aspx?ClassID=45
Software-Shanghai LingKong Technology Co., Ltd
en.lkmotor.cn
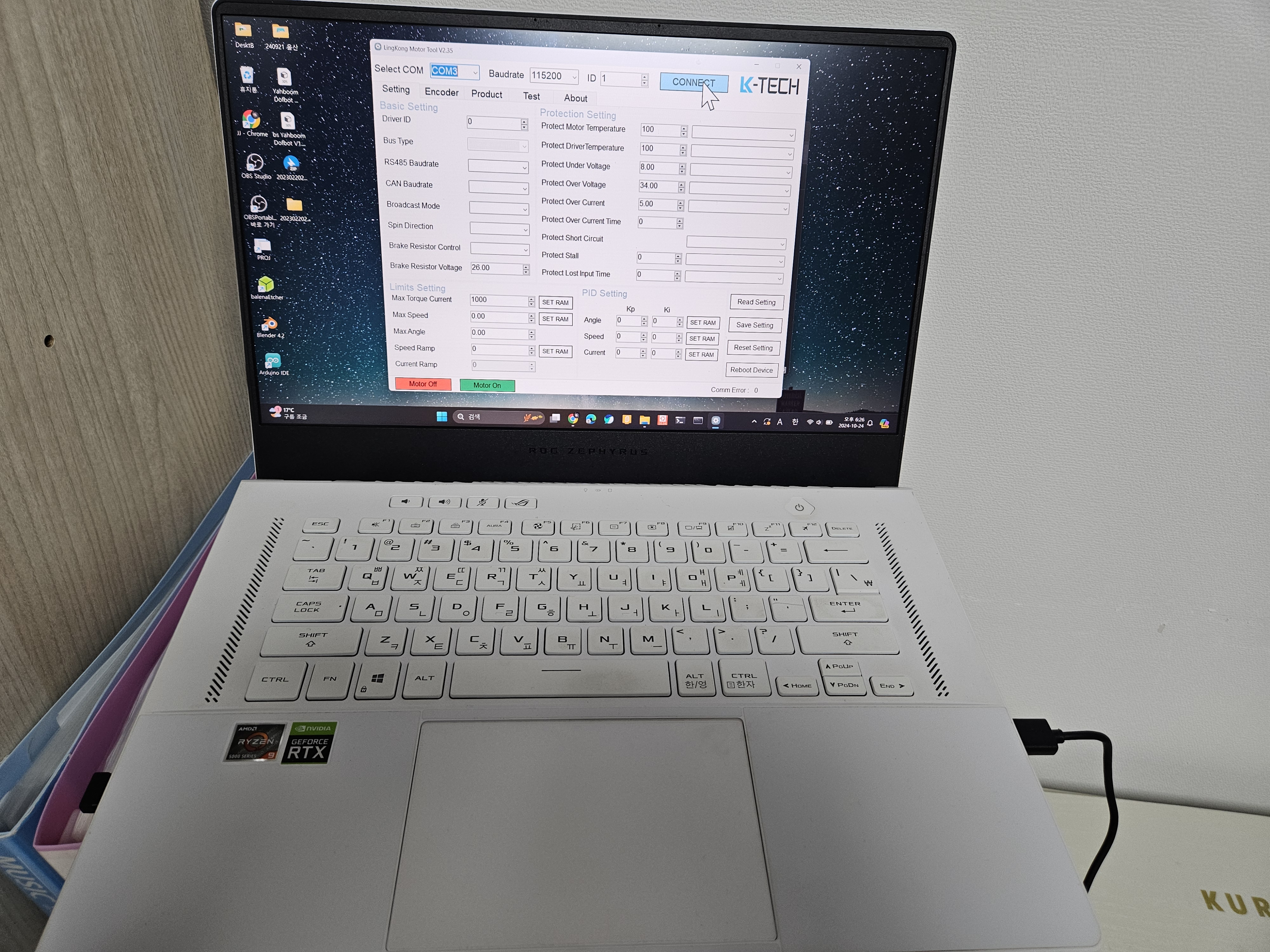
설치가 끝나고 재부팅하면 모터가 인식됩니다.
전원은 12V로 인가합니다. 생각보다 선이 얇습니다.
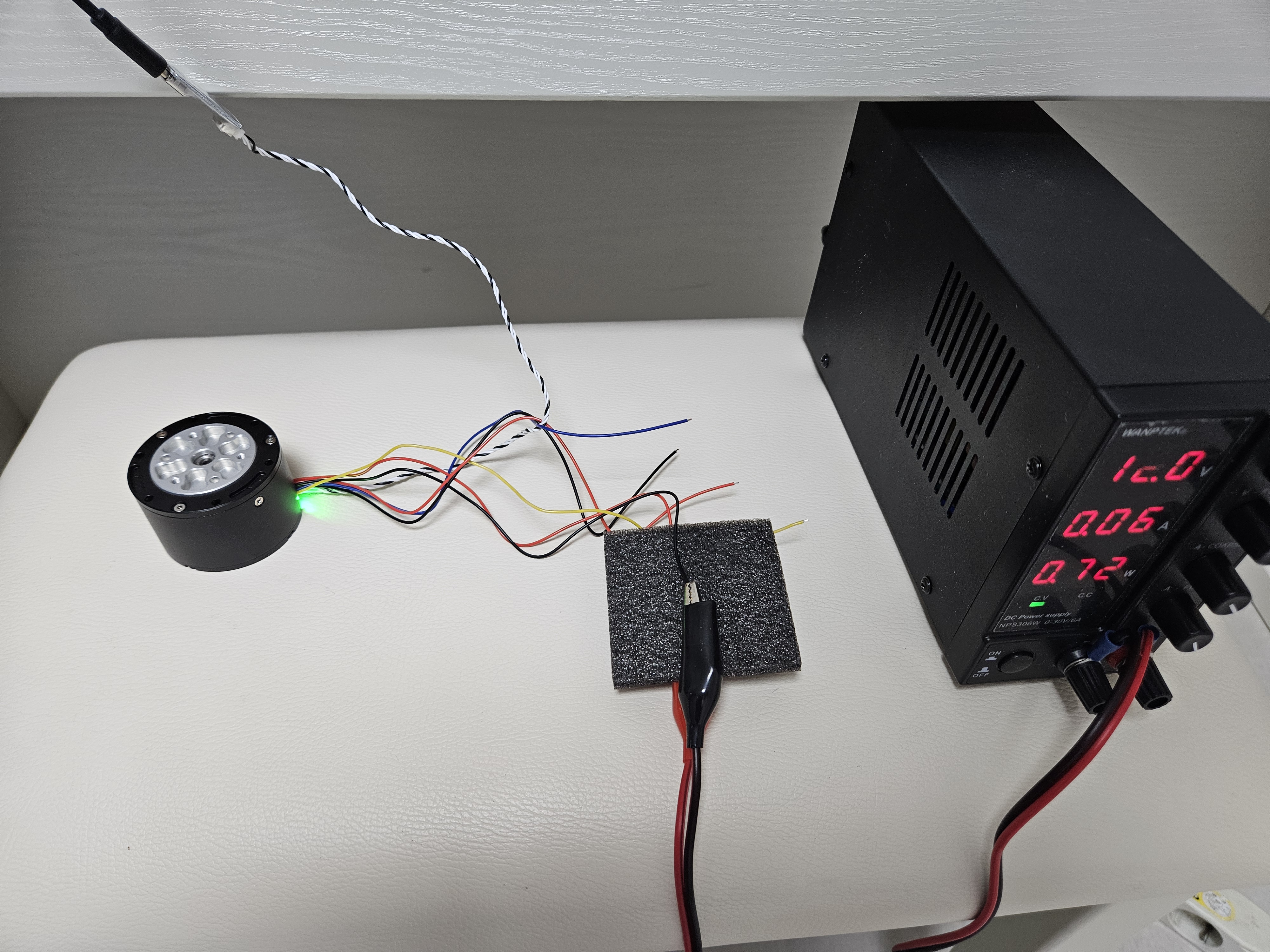
제대로 동작하는 것을 보고 이중화 전원시스템을 테스트해보았습니다.
MG시리즈 모터들은 전원 케이블이 두쌍 있습니다. 어느 쪽에 전원을 주더라도 동작합니다.
이번에 만드려는 로봇팔과 같은 구조에서는 한쪽에서 전원을 받고 다른 쪽에는 전달하는 형태로 사용할 수 있습니다.

결국 모터 하나를 브릿지로 사용해서 두번째 모터를 테스트해 봅니다.
4005모델인데도 생각보다 토크가 묵직합니다. 이렇게 매니퓰레이터로 활용하면 되겠다는 가능성이 보입니다^^
오늘은 모터의 작동에 대해 알아봤습니다~ 모두들 빠이팅!!
*참 허깅페이스에서 로봇공학에 쉽게 접근할 수 있도록 lerobot을 공개했습니다.
https://huggingface.co/lerobot
https://github.com/huggingface/lerobot